Python for CFD
Lesson 1.2 of the CFD for Absolute Beginners course — Python for CFD.
Module 1.2 — Python for CFD
Why a dedicated Python module before the physics? Every CFD equation you write from Module 1.3 onward will be coded as a NumPy array operation. If the array indexing is wrong, the physics will be wrong — and the error won't announce itself. The solver will run, converge, and give you a beautiful but incorrect result.
This module builds the exact Python vocabulary you need so that later, when you are thinking about the physics, you are not simultaneously fighting the syntax.
Roadmap:
- The CFD data model — why a field is just an array
- Vectorisation — why loops are forbidden in CFD code
- Array slicing as stencils — the core pattern you will use in every solver
- Building and working with 2D grids
- Essential visualisation patterns for CFD
- Common mistakes and how to catch them
import numpy as np
import matplotlib.pyplot as plt
import time
1. The CFD Data Model
A field is just an array
In the real world, temperature exists as a continuous function — a value at every point in space at every instant of time. In CFD, you represent this with a 3D array:
T[j, i, n] # temperature at cell (i,j) at time step n
The indices encode location and time. The value at each index is one number. Everything else in CFD is manipulating these numbers according to the physics.
The index convention used throughout this curriculum
u[j, i] → velocity at column i (x direction), row j (y direction)
↑ ↑
axis 0 axis 1
(y direction) (x direction)
Physical picture:
j=ny-1 ┌──────────────────┐
j=ny-2 │ u[ny-2, :] │ ← second row from top
... │ │
j=1 │ u[1, :] │ ← second row from bottom
j=0 └──────────────────┘
i=0 i=1 ... i=nx-1
Why j first? NumPy stores arrays in row-major order (C order). Row index is the outer loop, column index is the inner loop. Since y maps to rows and x to columns, gives the point at .
Common mistake: confusing and axes. If your flow goes the wrong direction or your contour plots are transposed, this is always the first thing to check.
# ── Why loops are forbidden — benchmark ─────────────────────────────────────
# The second-derivative stencil: d²u/dx² ≈ (u[i+1] - 2u[i] + u[i-1]) / dx²
# Applied at every interior point of a 500×500 grid.
N = 500
u = np.random.rand(N, N)
dx = 1.0 / N
# ── Loop version (what you might write first) ────────────────────────────────
t0 = time.perf_counter()
d2u_loop = np.zeros_like(u)
for j in range(1, N-1):
for i in range(1, N-1):
d2u_loop[j, i] = (u[j, i+1] - 2*u[j, i] + u[j, i-1]) / dx**2
t_loop = time.perf_counter() - t0
# ── Vectorised version (what you must write for CFD) ────────────────────────
# Replace the inner loops with array slicing.
# u[1:-1, 2:] → all interior rows, shifted one cell to the RIGHT (= u[j, i+1])
# u[1:-1, 1:-1] → all interior rows, centre cell (= u[j, i] )
# u[1:-1, :-2] → all interior rows, shifted one cell to the LEFT (= u[j, i-1])
t0 = time.perf_counter()
d2u_vec = np.zeros_like(u)
d2u_vec[1:-1, 1:-1] = (u[1:-1, 2:] - 2*u[1:-1, 1:-1] + u[1:-1, :-2]) / dx**2
t_vec = time.perf_counter() - t0
print(f'Loop version: {t_loop*1000:.1f} ms')
print(f'Vectorised version: {t_vec*1000:.2f} ms')
print(f'Speedup: {t_loop/t_vec:.0f}×')
print(f'Results identical: {np.allclose(d2u_loop, d2u_vec)} ← must be True')
print()
print('A 500-iteration CFD solve with loops would take:',
f'{t_loop * 500:.1f} s')
print('A 500-iteration CFD solve vectorised takes:',
f'{t_vec * 500:.2f} s')
print('Loop code is not wrong — it is just too slow for any real simulation.')
Loop version: 132.6 ms
Vectorised version: 0.82 ms
Speedup: 161×
Results identical: True ← must be True
A 500-iteration CFD solve with loops would take: 66.3 s
A 500-iteration CFD solve vectorised takes: 0.41 s
Loop code is not wrong — it is just too slow for any real simulation.
2. Array Slicing as Stencils — The Core Pattern
Every finite-difference formula involves a grid point and its neighbours. Array slicing implements this without loops.
The shift table — know this by heart
For a 1D array u of length N:
| Python slice | Meaning | Finite-difference role |
|---|---|---|
u[1:-1] | All interior points | The point |
u[2:] | Shifted right by 1 | Right neighbour |
u[:-2] | Shifted left by 1 | Left neighbour |
u[3:] | Shifted right by 2 | |
u[:-3] | Shifted left by 2 |
For a 2D array u of shape (ny, nx):
| Expression | Grid neighbour |
|---|---|
u[1:-1, 2:] | Right: |
u[1:-1, :-2] | Left: |
u[2:, 1:-1] | Up: |
u[:-2, 1:-1] | Down: |
The three fundamental stencils
First derivative — central difference ():
dudx[1:-1] = (u[2:] - u[:-2]) / (2*dx)
First derivative — upwind (, but stable for advection):
dudx[1:] = (u[1:] - u[:-1]) / dx
Second derivative — central ():
d2udx2[1:-1] = (u[2:] - 2*u[1:-1] + u[:-2]) / dx**2
This last stencil — u[2:] - 2*u[1:-1] + u[:-2] — appears in every diffusion equation, every pressure Poisson equation, and every implicit solver. Memorise it.
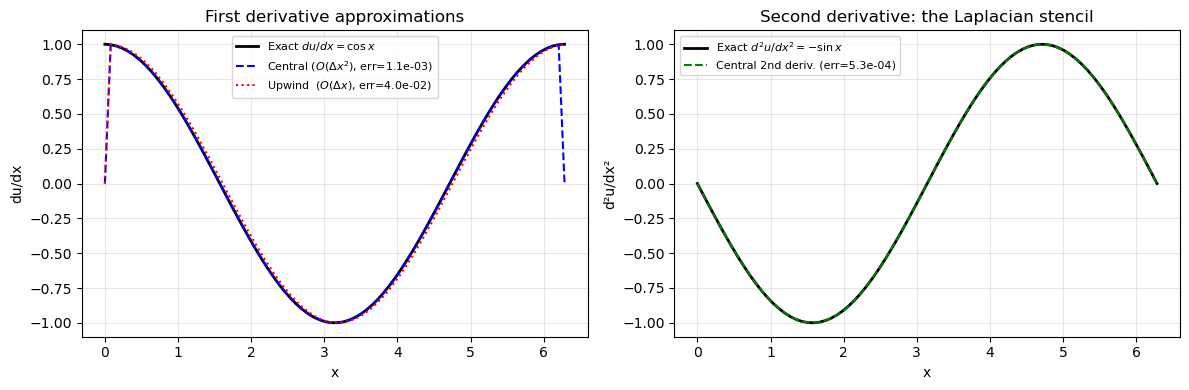
# ── Verify all three stencils on a known function ───────────────────────────
# Use u(x) = sin(x) → du/dx = cos(x) → d²u/dx² = -sin(x)
N = 80
x = np.linspace(0, 2*np.pi, N)
dx = x[1] - x[0]
u = np.sin(x)
# ── Derivatives ─────────────────────────────────────────────────────────────
dudx_central = np.zeros(N)
dudx_central[1:-1] = (u[2:] - u[:-2]) / (2*dx) # central: O(dx²)
dudx_upwind = np.zeros(N)
dudx_upwind[1:] = (u[1:] - u[:-1]) / dx # upwind: O(dx)
d2udx2 = np.zeros(N)
d2udx2[1:-1] = (u[2:] - 2*u[1:-1] + u[:-2]) / dx**2 # central: O(dx²)
# ── Errors ──────────────────────────────────────────────────────────────────
err_central = np.max(np.abs(dudx_central[1:-1] - np.cos(x[1:-1])))
err_upwind = np.max(np.abs(dudx_upwind[1:-1] - np.cos(x[1:-1])))
err_2nd = np.max(np.abs(d2udx2[1:-1] - (-np.sin(x[1:-1]))))
print(f'Central difference du/dx: max error = {err_central:.2e} ← O(dx²) = {dx**2:.2e}')
print(f'Upwind difference du/dx: max error = {err_upwind:.2e} ← O(dx) = {dx:.2e}')
print(f'Central difference d²u/dx²: max error = {err_2nd:.2e} ← O(dx²) = {dx**2:.2e}')
print()
print('Central difference is more accurate than upwind because it uses')
print('both neighbours symmetrically → cancels the O(dx) error term.')
fig, axes = plt.subplots(1, 2, figsize=(12, 4))
axes[0].plot(x, np.cos(x), 'k-', lw=2, label='Exact $du/dx = \\cos x$')
axes[0].plot(x, dudx_central, 'b--', lw=1.5, label=f'Central ($O(\\Delta x^2)$, err={err_central:.1e})')
axes[0].plot(x, dudx_upwind, 'r:', lw=1.5, label=f'Upwind ($O(\\Delta x)$, err={err_upwind:.1e})')
axes[0].set_xlabel('x'); axes[0].set_ylabel('du/dx')
axes[0].set_title('First derivative approximations'); axes[0].legend(fontsize=8)
axes[0].grid(True, alpha=0.3)
axes[1].plot(x, -np.sin(x), 'k-', lw=2, label='Exact $d^2u/dx^2 = -\\sin x$')
axes[1].plot(x, d2udx2, 'g--', lw=1.5, label=f'Central 2nd deriv. (err={err_2nd:.1e})')
axes[1].set_xlabel('x'); axes[1].set_ylabel('d²u/dx²')
axes[1].set_title('Second derivative: the Laplacian stencil')
axes[1].legend(fontsize=8); axes[1].grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
Central difference du/dx: max error = 1.05e-03 ← O(dx²) = 6.33e-03
Upwind difference du/dx: max error = 3.98e-02 ← O(dx) = 7.95e-02
Central difference d²u/dx²: max error = 5.27e-04 ← O(dx²) = 6.33e-03
Central difference is more accurate than upwind because it uses
both neighbours symmetrically → cancels the O(dx) error term.
3. Building and Working with 2D Grids
The standard grid setup
Every 2D solver in this curriculum starts with this exact pattern:
nx, ny = 50, 40 # number of cells in x, y
Lx, Ly = 2.0, 1.0 # domain size
dx = Lx / nx
dy = Ly / ny
x = np.linspace(0.5*dx, Lx - 0.5*dx, nx) # cell-CENTRE positions
y = np.linspace(0.5*dy, Ly - 0.5*dy, ny)
X, Y = np.meshgrid(x, y) # shape: (ny, nx)
Cell centres vs. cell faces: We place the grid points at cell centres, not at the faces. This is the cell-centred FVM convention used by OpenFOAM and Fluent. The domain goes from 0 to Lx, but the first cell centre is at , not at 0.
Face Cell Face Cell Face
| x[0] | x[1] | x[2] |
0 dx/2 dx 3dx/2 2dx 5dx/2
Why cell centres? Boundary conditions are applied at the faces. Cell-centre storage naturally gives second-order accuracy: the face is equidistant from both neighbouring centres, so linear interpolation between them is exact for any linear field.
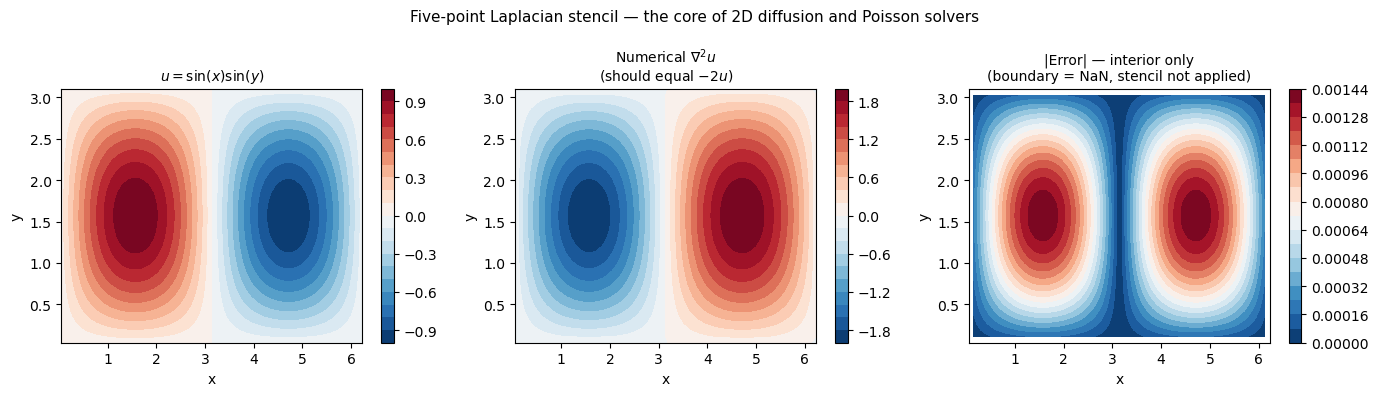
The 2D Laplacian — the most important 2D stencil
lap[1:-1, 1:-1] = (
(u[1:-1, 2:] - 2*u[1:-1, 1:-1] + u[1:-1, :-2]) / dx**2 +
(u[2:, 1:-1] - 2*u[1:-1, 1:-1] + u[:-2, 1:-1]) / dy**2
)
This is the five-point stencil — the workhorse of 2D CFD. It appears in the pressure Poisson equation, heat conduction, and viscous terms.
# ── 2D grid setup and the five-point Laplacian stencil ──────────────────────
# ── Grid ────────────────────────────────────────────────────────────────────
nx, ny = 60, 40
Lx, Ly = 2*np.pi, np.pi
dx = Lx / nx; dy = Ly / ny
x = np.linspace(0.5*dx, Lx - 0.5*dx, nx)
y = np.linspace(0.5*dy, Ly - 0.5*dy, ny)
X, Y = np.meshgrid(x, y) # shape: (ny, nx) = (40, 60)
# ── Test function: u = sin(x)·sin(y) ────────────────────────────────────────
# Exact Laplacian: ∇²u = -sin(x)sin(y) - sin(x)sin(y) = -2·sin(x)sin(y) = -2u
u = np.sin(X) * np.sin(Y)
lap_exact = -2 * u
# ── Numerical 2D Laplacian (five-point stencil) ──────────────────────────────
lap_num = np.zeros_like(u)
lap_num[1:-1, 1:-1] = (
(u[1:-1, 2:] - 2*u[1:-1, 1:-1] + u[1:-1, :-2]) / dx**2 + # d²u/dx²
(u[2:, 1:-1] - 2*u[1:-1, 1:-1] + u[:-2, 1:-1]) / dy**2 # d²u/dy²
)
# ── Error — same shape as X, Y (boundary rows left as zero so stencil wasn't applied)
error_full = np.abs(lap_num - lap_exact)
# Zero out boundary rows/cols so the colour scale shows interior error only
error_plot = error_full.copy()
error_plot[[0,-1], :] = np.nan
error_plot[:, [0,-1]] = np.nan
# Report interior error only
interior_err = error_full[1:-1, 1:-1]
print(f'Grid: {ny}×{nx}, dx={dx:.4f}, dy={dy:.4f}')
print(f'Max interior error: {interior_err.max():.3e}')
print(f'Expected O(dx²): {dx**2:.3e}')
print(f'Ratio (error/dx²): {interior_err.max()/dx**2:.3f} ← should be O(1)')
fig, axes = plt.subplots(1, 3, figsize=(14, 4))
for ax, field, title in zip(axes,
[u, lap_num, error_plot],
['$u = \\sin(x)\\sin(y)$',
'Numerical $\\nabla^2 u$\n(should equal $-2u$)',
'|Error| — interior only\n(boundary = NaN, stencil not applied)']):
cf = ax.contourf(X, Y, field, levels=20, cmap='RdBu_r')
plt.colorbar(cf, ax=ax)
ax.set_title(title, fontsize=10)
ax.set_xlabel('x'); ax.set_ylabel('y')
plt.suptitle('Five-point Laplacian stencil — the core of 2D diffusion and Poisson solvers',
fontsize=11)
plt.tight_layout()
plt.show()
Grid: 40×60, dx=0.1047, dy=0.0785
Max interior error: 1.424e-03
Expected O(dx²): 1.097e-02
Ratio (error/dx²): 0.130 ← should be O(1)
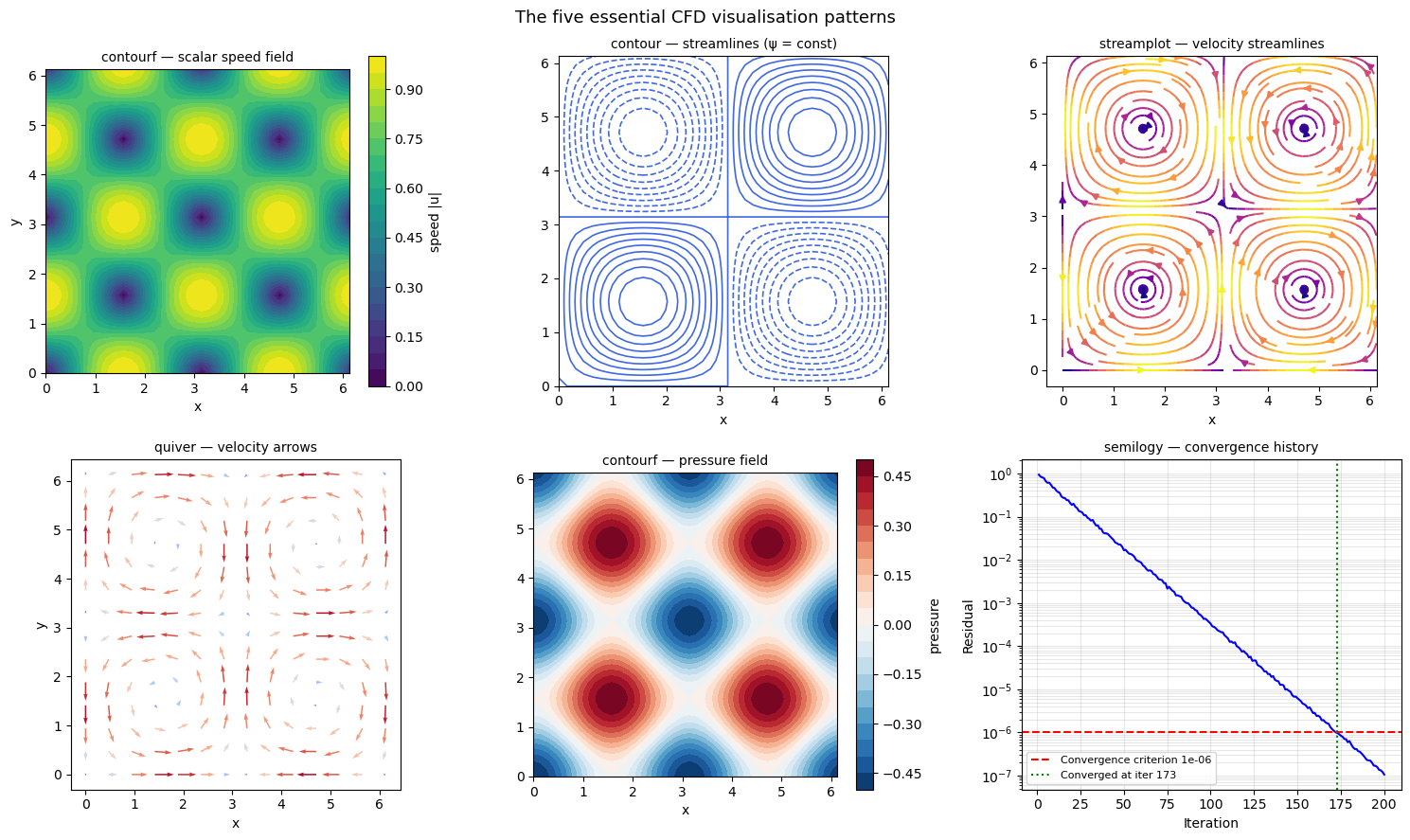
4. Essential Visualisation Patterns
You will use these five plot types constantly. Learn them once and use them everywhere.
| Plot call | When to use | What it shows |
|---|---|---|
ax.contourf(X,Y,field) | Scalar fields (p, T, speed) | Filled colour map |
ax.contour(X,Y,field) | Scalar fields (streamfunction) | Iso-contour lines |
ax.streamplot(X,Y,U,V) | 2D velocity field | Smooth streamlines |
ax.quiver(X,Y,U,V) | Sparse velocity arrows | Direction + magnitude vectors |
ax.semilogy(iters, res) | Convergence history | Residuals spanning many decades |
The most important visualisation rule
Always use ax.set_aspect('equal') for flow field plots. Distorted aspect ratios make a circular vortex look elliptical — a physically wrong picture that leads to wrong intuition.
# ── The five essential CFD visualisation patterns ───────────────────────────
# Using a Taylor-Green vortex: u = sin(x)cos(y), v = -cos(x)sin(y)
# This is an exact incompressible solution (div u = 0 everywhere)
nx, ny = 40, 40
x = np.linspace(0, 2*np.pi, nx, endpoint=False)
y = np.linspace(0, 2*np.pi, ny, endpoint=False)
X, Y = np.meshgrid(x, y)
U = np.sin(X) * np.cos(Y)
V = -np.cos(X) * np.sin(Y)
speed = np.sqrt(U**2 + V**2)
pressure = -(np.cos(2*X) + np.cos(2*Y)) / 4 # exact pressure for TG vortex
psi = np.sin(X) * np.sin(Y) # streamfunction
# ── Convergence history (simulated) ─────────────────────────────────────────
# Decay rate 0.08 → at iter 200: exp(-200*0.08) = exp(-16) ≈ 1e-7 (below 1e-6 ✓)
np.random.seed(42)
iters = np.arange(1, 201)
residual = 1.0 * np.exp(-iters * 0.08) * (1 + 0.05*np.random.randn(200))
residual = np.maximum(residual, 1e-8) # floor at near-machine-precision
fig, axes = plt.subplots(2, 3, figsize=(15, 9))
# (1) Filled scalar field
cf = axes[0,0].contourf(X, Y, speed, levels=20, cmap='viridis')
plt.colorbar(cf, ax=axes[0,0], label='speed |u|')
axes[0,0].set_aspect('equal')
axes[0,0].set_title('contourf — scalar speed field', fontsize=10)
axes[0,0].set_xlabel('x'); axes[0,0].set_ylabel('y')
# (2) Iso-contour lines
axes[0,1].contour(X, Y, psi, levels=20, colors='royalblue', linewidths=1.2)
axes[0,1].set_aspect('equal')
axes[0,1].set_title('contour — streamlines (ψ = const)', fontsize=10)
axes[0,1].set_xlabel('x')
# (3) Streamplot
axes[0,2].streamplot(X, Y, U, V, color=speed, cmap='plasma',
linewidth=1.5, density=1.2)
axes[0,2].set_aspect('equal')
axes[0,2].set_title('streamplot — velocity streamlines', fontsize=10)
axes[0,2].set_xlabel('x')
# (4) Quiver plot
skip = 3
axes[1,0].quiver(X[::skip,::skip], Y[::skip,::skip],
U[::skip,::skip], V[::skip,::skip],
speed[::skip,::skip], cmap='coolwarm')
axes[1,0].set_aspect('equal')
axes[1,0].set_title('quiver — velocity arrows', fontsize=10)
axes[1,0].set_xlabel('x'); axes[1,0].set_ylabel('y')
# (5) Pressure contourf
cf2 = axes[1,1].contourf(X, Y, pressure, levels=20, cmap='RdBu_r')
plt.colorbar(cf2, ax=axes[1,1], label='pressure')
axes[1,1].set_aspect('equal')
axes[1,1].set_title('contourf — pressure field', fontsize=10)
axes[1,1].set_xlabel('x')
# (6) Convergence history
threshold = 1e-6
axes[1,2].semilogy(iters, residual, 'b-', linewidth=1.5)
axes[1,2].axhline(threshold, color='r', linestyle='--',
label=f'Convergence criterion {threshold:.0e}')
conv_candidates = iters[residual < threshold]
if len(conv_candidates) > 0:
conv_i = conv_candidates[0]
axes[1,2].axvline(conv_i, color='g', linestyle=':',
label=f'Converged at iter {conv_i}')
else:
axes[1,2].text(0.5, 0.5, 'Not yet converged',
transform=axes[1,2].transAxes, ha='center', color='red')
axes[1,2].set_xlabel('Iteration'); axes[1,2].set_ylabel('Residual')
axes[1,2].set_title('semilogy — convergence history', fontsize=10)
axes[1,2].legend(fontsize=8); axes[1,2].grid(True, which='both', alpha=0.3)
plt.suptitle('The five essential CFD visualisation patterns', fontsize=13)
plt.tight_layout()
plt.show()
5. Common Mistakes and How to Catch Them
Mistake 1 — Off-by-one boundary errors
The interior stencil u[1:-1, 1:-1] leaves the boundary rows/columns at their initial value (usually zero). If you forget to set boundary conditions after the interior update, the boundaries will be wrong and the solver will diverge.
Rule: Every time step, update interior → apply BCs. Never skip the BC step.
Mistake 2 — Shape mismatch
The two divergence slices u[1:-1, 2:] - u[1:-1, :-2] give shape (ny-2, nx-2). If you mix forward-difference slices with central-difference slices, the shapes won't match and you get a ValueError. Always write out the shapes of every slice when debugging.
Mistake 3 — In-place modification during stencil update
# WRONG — u[j] is modified before u[j+1] can read the old u[j]
u[1:-1] = u[1:-1] + dt * (u[2:] - 2*u[1:-1] + u[:-2])
Wait — this is actually safe for explicit time-stepping because NumPy evaluates the right side completely before assigning. But in a Gauss-Seidel iteration (implicit, sequential updates), you must copy first:
u_old = u.copy() # always copy before a loop that reads old values
Mistake 4 — Using np.trapz (removed in NumPy 2.0)
Use np.trapezoid instead. You will see both in old code; only the new name works with NumPy ≥ 2.0.
Summary
| Concept | Key rule |
|---|---|
| Indexing | u[j, i] → row = y, column = x |
| Vectorisation | No nested loops in the inner solver — always array slices |
| Central-diff 1st deriv | (u[2:] - u[:-2]) / (2*dx) → |
| Laplacian stencil | u[2:]-2*u[1:-1]+u[:-2] in x plus same in y |
| Grid | Cell-centre positions: linspace(0.5*dx, L-0.5*dx, N) |
| After every update | Apply boundary conditions before the next time step |
| Always verify | Print the shape of every new array; run a known-answer test |
Next: Module 1.3 — Conservation Laws: mass, momentum, energy, and the Reynolds Transport Theorem that links them all.
Exercise
Predict first, then code.
-
For on with : what is the exact second derivative at ? (Hint: differentiate twice.)
-
Compute it numerically using the stencil
(u[2:] - 2*u[1:-1] + u[:-2]) / dx**2. How close is your answer to the exact value at ? -
Repeat with . By what factor does the error change? Does it match the prediction?