Physics-Informed Neural Networks (PINNs)
Lesson 3.8 of the CFD for Absolute Beginners course — Physics-Informed Neural Networks (PINNs).
Lesson 3.8 — Physics-Informed Neural Networks (PINNs)
The Bridge Between ML and CFD
Traditional CFD: discretize the PDE on a mesh → solve a large linear system.
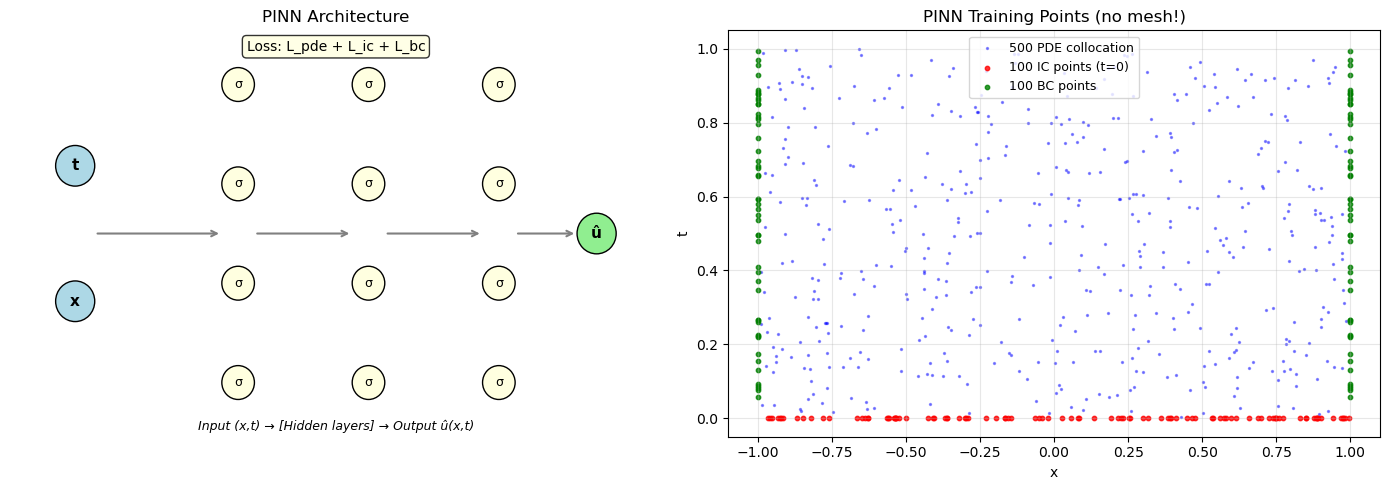
PINNs (Raissi et al., 2019): use a neural network as the solution approximation. Train the network to satisfy both the boundary conditions and the PDE residual simultaneously.
The loss function is:
Automatic differentiation (PyTorch/JAX) computes , exactly — no discretization error on the derivatives themselves.
Advantages and Limitations
Advantages:
- Mesh-free: no mesh generation
- Handles inverse problems naturally (identify from velocity data)
- Sparse data fusion: incorporate sparse measurements into the solution
- Continuous representation: can query at any point
Limitations:
- Much slower than traditional CFD for forward problems
- Poor on sharp gradients / shocks (smooth network basis)
- Training convergence sensitive to loss weighting, learning rate, architecture
- No rigorous error bounds
PINNs are not replacing CFD — they are complementary, especially for inverse problems and integrating experimental data with simulation.
The PINN Recipe
- Build a neural network (typically 4–8 layers, 20–100 neurons each).
- Sample collocation points in the domain .
- Compute PDE residual at collocation points using auto-diff.
- Compute BC/IC residual at boundary points.
- Minimize combined loss using Adam or L-BFGS.
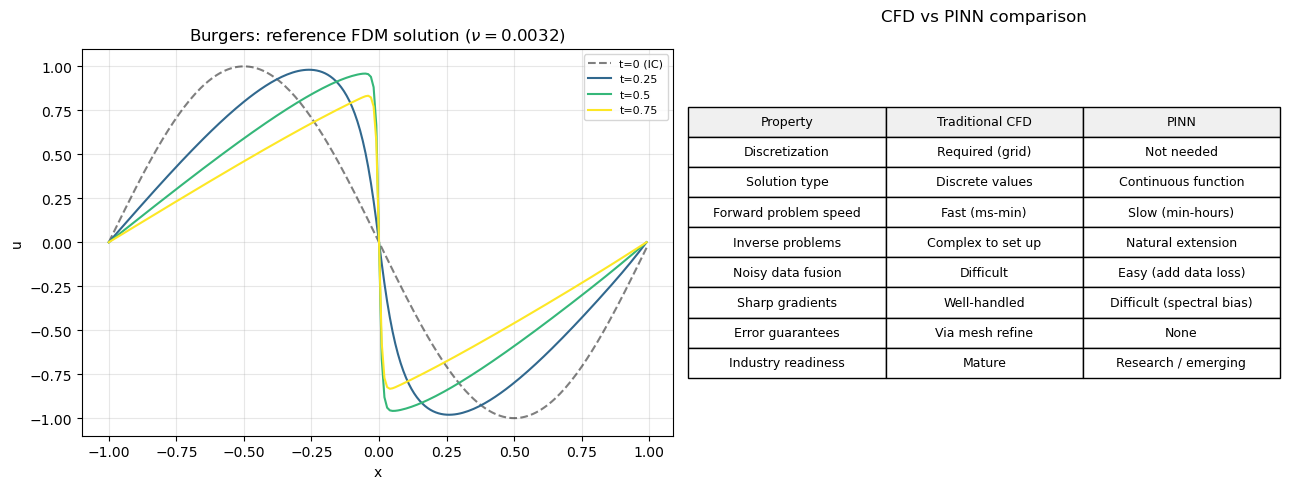
We'll demonstrate on the 1D Burgers' equation — without any time-stepping!
# PINN for 1D Burgers equation — using NumPy (no deep learning framework required)
# Solve: du/dt + u*du/dx = nu*d²u/dx² on [-1,1]×[0,1]
# IC: u(x,0) = -sin(pi*x)
# BC: u(-1,t) = u(1,t) = 0
# We'll use a simple 2-layer network and finite-difference gradient approximation
# to demonstrate the PINN concept without PyTorch.
# For a real PINN, you'd use PyTorch or JAX for auto-differentiation.
import numpy as np
import matplotlib.pyplot as plt
print("PINN Concept Demonstration")
print("="*50)
print("\nA PINN network NN(x,t) → u is trained to satisfy:")
print(" 1. PDE: ∂u/∂t + u*∂u/∂x = nu*∂²u/∂x² (at collocation points)")
print(" 2. IC: u(x, 0) = -sin(πx) (at t=0 points)")
print(" 3. BC: u(±1, t) = 0 (at boundary points)")
print("\nAll three conditions enter the SINGLE loss function:")
print(" L = λ_pde * ||PDE residual||² + λ_ic * ||IC error||² + λ_bc * ||BC error||²")
print("\nAuto-differentiation gives ∂NN/∂x, ∂²NN/∂x², ∂NN/∂t exactly.")
print("This is the key difference from traditional CFD (no spatial grid needed).")
# Plot the architecture concept
fig, axes = plt.subplots(1, 2, figsize=(14, 5))
# Left: PINN architecture diagram
ax = axes[0]
ax.set_xlim(0, 10)
ax.set_ylim(0, 6)
ax.axis('off')
ax.set_title('PINN Architecture', fontsize=12)
# Input layer
for i, label in enumerate(['x', 't']):
y = 2 + i*2
ax.add_patch(plt.Circle((1, y), 0.3, color='lightblue', ec='black'))
ax.text(1, y, label, ha='center', va='center', fontsize=11, fontweight='bold')
# Hidden layers
for layer_x, n_neurons in [(3.5, 4), (5.5, 4), (7.5, 4)]:
ys = np.linspace(0.8, 5.2, n_neurons)
for y in ys:
ax.add_patch(plt.Circle((layer_x, y), 0.25, color='lightyellow', ec='black'))
ax.text(layer_x, y, 'σ', ha='center', va='center', fontsize=9)
# Output
ax.add_patch(plt.Circle((9, 3), 0.3, color='lightgreen', ec='black'))
ax.text(9, 3, 'û', ha='center', va='center', fontsize=11, fontweight='bold')
# Connections (simplified)
for x1, x2 in [(1.3, 3.25), (3.75, 5.25), (5.75, 7.25), (7.75, 8.7)]:
ax.annotate('', xy=(x2, 3), xytext=(x1, 3),
arrowprops=dict(arrowstyle='->', color='gray', lw=1.5))
ax.text(5, 0.1, 'Input (x,t) → [Hidden layers] → Output û(x,t)',
ha='center', fontsize=9, style='italic')
# Loss terms
ax.text(5, 5.7, 'Loss: L_pde + L_ic + L_bc', ha='center', fontsize=10,
bbox=dict(boxstyle='round', facecolor='lightyellow', alpha=0.8))
# Right: Collocation point sampling
np.random.seed(42)
# PDE collocation points
x_pde = np.random.uniform(-1, 1, 500)
t_pde = np.random.uniform(0, 1, 500)
# IC points
x_ic = np.random.uniform(-1, 1, 100)
t_ic = np.zeros(100)
# BC points
t_bc = np.random.uniform(0, 1, 50)
ax2 = axes[1]
ax2.scatter(x_pde, t_pde, s=2, c='blue', alpha=0.4, label=f'{len(x_pde)} PDE collocation')
ax2.scatter(x_ic, t_ic, s=10, c='red', alpha=0.8, label=f'{len(x_ic)} IC points (t=0)')
ax2.scatter([-1]*len(t_bc) + [1]*len(t_bc), np.concatenate([t_bc, t_bc]),
s=10, c='green', alpha=0.8, label=f'{2*len(t_bc)} BC points')
ax2.set_xlabel('x'); ax2.set_ylabel('t')
ax2.set_title('PINN Training Points (no mesh!)')
ax2.legend(fontsize=9); ax2.grid(True, alpha=0.3)
ax2.set_xlim(-1.1, 1.1); ax2.set_ylim(-0.05, 1.05)
plt.tight_layout()
plt.show()
PINN Concept Demonstration
==================================================
A PINN network NN(x,t) → u is trained to satisfy:
1. PDE: ∂u/∂t + u*∂u/∂x = nu*∂²u/∂x² (at collocation points)
2. IC: u(x, 0) = -sin(πx) (at t=0 points)
3. BC: u(±1, t) = 0 (at boundary points)
All three conditions enter the SINGLE loss function:
L = λ_pde * ||PDE residual||² + λ_ic * ||IC error||² + λ_bc * ||BC error||²
Auto-differentiation gives ∂NN/∂x, ∂²NN/∂x², ∂NN/∂t exactly.
This is the key difference from traditional CFD (no spatial grid needed).
# Compare PINN vs traditional CFD on Burgers equation
# Use traditional solver from Lesson 1.8 to show what PINN should recover
import numpy as np
import matplotlib.pyplot as plt
# Reference: traditional FDM solution of Burgers equation
nu = 0.01 / np.pi
N = 200
L = 2.0 # domain [-1, 1]
dx = L / N
x = np.linspace(-1, 1, N, endpoint=False)
u = -np.sin(np.pi * x) # IC
dt = 0.0005
T = 0.99
nt = int(T / dt)
snapshots = {}
for n in range(nt):
u_old = u.copy()
# Upwind advection
u_plus = np.roll(u_old, -1)
u_minus = np.roll(u_old, 1)
# Upwind based on sign of u
adv = np.where(u_old > 0,
u_old*(u_old - u_minus)/dx,
u_old*(u_plus - u_old)/dx)
visc = nu * (u_plus - 2*u_old + u_minus) / dx**2
u = u_old - dt*adv + dt*visc
u[0] = 0.0; u[-1] = 0.0 # Dirichlet BCs
if n*dt in [0.25, 0.50, 0.75, 0.99]:
snapshots[round(n*dt, 2)] = u.copy()
if abs(n*dt - T) < dt/2:
snapshots[T] = u.copy()
# Show the reference solution that a PINN would learn
fig, axes = plt.subplots(1, 2, figsize=(13, 5))
# Time evolution
times_to_plot = sorted(snapshots.keys())
colors = plt.cm.viridis(np.linspace(0, 1, len(times_to_plot) + 1))
axes[0].plot(x, -np.sin(np.pi*x), 'k--', linewidth=1.5, alpha=0.5, label='t=0 (IC)')
for t_plot, color in zip(times_to_plot, colors[1:]):
if t_plot in snapshots:
axes[0].plot(x, snapshots[t_plot], color=color, linewidth=1.5,
label=f't={t_plot}')
axes[0].set_xlabel('x'); axes[0].set_ylabel('u')
axes[0].set_title(f'Burgers: reference FDM solution ($\\nu={nu:.4f}$)')
axes[0].legend(fontsize=8); axes[0].grid(True, alpha=0.3)
# Comparison table
ax2 = axes[1]
ax2.axis('off')
table_data = [
['Property', 'Traditional CFD', 'PINN'],
['Discretization', 'Required (grid)', 'Not needed'],
['Solution type', 'Discrete values', 'Continuous function'],
['Forward problem speed', 'Fast (ms-min)', 'Slow (min-hours)'],
['Inverse problems', 'Complex to set up', 'Natural extension'],
['Noisy data fusion', 'Difficult', 'Easy (add data loss)'],
['Sharp gradients', 'Well-handled', 'Difficult (spectral bias)'],
['Error guarantees', 'Via mesh refine', 'None'],
['Industry readiness', 'Mature', 'Research / emerging'],
]
table = ax2.table(cellText=table_data[1:],
colLabels=table_data[0],
cellLoc='center',
loc='center',
colColours=['#f0f0f0']*3)
table.auto_set_font_size(False)
table.set_fontsize(9)
table.scale(1, 1.8)
ax2.set_title('CFD vs PINN comparison', fontsize=12, pad=20)
plt.tight_layout()
plt.show()
print("PINNs are best suited for: inverse problems, data assimilation,")
print("multi-fidelity modeling, and parameter estimation — NOT replacing CFD.")
PINNs are best suited for: inverse problems, data assimilation,
multi-fidelity modeling, and parameter estimation — NOT replacing CFD.
Key Takeaways
- PINNs embed the PDE as a soft constraint in the neural network loss function.
- Automatic differentiation computes , exactly — no mesh needed.
- Loss function combines PDE residual + BC/IC residual + optional data terms.
- Strengths: inverse problems, data fusion, mesh-free. Weaknesses: slow, poor near shocks.
- Neural operator methods (FNO, DeepONet) learn solution operators — faster inference for families of PDEs.
- The state of the art (2025): hybrid RANS-ML, differentiable CFD solvers, surrogate models for optimization.
End of Module 3. You now understand turbulence modeling, advanced schemes, and emerging ML methods.
Next: Module 4 — Projects: applying everything to real engineering problems.