1D Diffusion Equation
Lesson 1.7 of the CFD for Absolute Beginners course — 1D Diffusion Equation.
Module 1.7 — 1D Diffusion Equation
The equation:
where is the diffusivity — same equation, different physical interpretation depending on context:
| Field | ||
|---|---|---|
| Heat conduction | Temperature | Thermal diffusivity |
| Viscous flow | Velocity | Kinematic viscosity |
| Mass diffusion | Concentration | Mass diffusivity |
| Turbulence | TKE | Effective diffusivity |
Why this module is critical before SIMPLE: The viscous terms in the Navier-Stokes equations are diffusion terms (). The stability of the momentum solver depends entirely on choosing the right time-stepping scheme for diffusion. This module explains why.
Roadmap:
- Physical intuition — what diffusion actually does to a field
- Explicit (FTCS) scheme — simple to code, severely limited
- The diffusion stability condition — why it is much harsher than CFL
- Implicit (BTCS) scheme — unconditionally stable, one tridiagonal solve
- Crank-Nicolson — second-order accurate in time and space
- Fourier stability analysis — prove stability from first principles
- Comparison: when to use each scheme
import numpy as np
import matplotlib.pyplot as plt
from scipy.linalg import solve_banded
1. Physical Intuition — Why Diffusion Smooths Everything
The hot rod analogy
Hold a metal rod with one end in a flame. Heat flows from the hot end toward the cold end — not at a fixed wave speed like advection, but by smoothing out temperature gradients. A spike in temperature spreads outward and flattens. Sharp differences get erased over time.
Mathematically, the second derivative tells you the concavity of the temperature profile:
- If is concave up (valley): → temperature increases there
- If is concave down (peak): → temperature decreases there
In plain English: peaks get shorter, valleys fill up. Diffusion is anti-curvature.
Exact solution by Fourier analysis
The exact solution for a single sine-wave initial condition is:
Two key observations:
- High wavenumbers ( large) decay exponentially faster — fine-scale features vanish quickly
- The decay rate is — proportional to the square of the wavenumber
This means: the diffusion equation acts as a low-pass filter on the spatial field. Any sharp feature (high ) is quickly smoothed out. Over long times, only the lowest-wavenumber components survive.
2. Explicit Scheme (FTCS) — Simple but Restricted
Discretisation
Forward in time, central in space:
Solve for :
where is the diffusion number (analogous to CFL for advection).
This is a single explicit formula — incredibly simple to code:
u[1:-1] += r * (u[2:] - 2*u[1:-1] + u[:-2])
The stability condition — much harsher than CFL
From von Neumann stability analysis (Section 6 below), the explicit scheme is stable only when:
This means: .
Why this is so restrictive: the time step scales with , not . Halving the grid spacing requires four times more time steps (compared to twice more for advection). Refining a 2D diffusion grid by 2× requires × more compute; in 3D it is ×.
For CFD in viscous flows: near a solid wall, can be m. The explicit stability limit gives s — completely infeasible for any flow that takes seconds to develop. This is why all real CFD codes use implicit schemes for diffusion.
3. Implicit Scheme (BTCS) — Unconditionally Stable
Key idea: use the new time level on the right side
Backward in time, central in space:
This can't be solved one cell at a time — all values are unknown simultaneously. Rearranging:
This is a tridiagonal linear system :
Solve with scipy.linalg.solve_banded — operations per time step.
Key property: unconditionally stable for all — you can take arbitrarily large time steps. The solution remains bounded. Large time steps reduce accuracy (first-order in time) but never blow up.
Crank-Nicolson — the best of both
Average the explicit and implicit right-hand sides:
Result: second-order accurate in both time and space, unconditionally stable. This is the default scheme for the heat equation and for the viscous terms in many N-S solvers.
# ── Three diffusion solvers: explicit, implicit (BTCS), Crank-Nicolson ───────
def diffuse_explicit(u0, alpha, dx, dt, nt):
"""FTCS: simple, first-order, requires r <= 0.5."""
u = u0.copy()
r = alpha * dt / dx**2
for _ in range(nt):
u[1:-1] += r * (u[2:] - 2*u[1:-1] + u[:-2])
# Dirichlet BCs: u[0]=u[-1]=0 are preserved by not touching boundaries
return u
def build_tridiagonal(N, r, theta=1.0):
"""
Build banded matrix for implicit diffusion.
theta=1.0 → BTCS (fully implicit)
theta=0.5 → Crank-Nicolson
Returns ab (banded form for solve_banded), plus RHS multiplier for u^n.
"""
ab = np.zeros((3, N-2)) # N-2 interior points
ab[0, 1:] = -theta * r # super-diagonal
ab[1, :] = 1 + 2*theta*r # main diagonal
ab[2, :-1] = -theta * r # sub-diagonal
return ab
def diffuse_implicit(u0, alpha, dx, dt, nt, theta=1.0):
"""
theta=1.0 → BTCS, theta=0.5 → Crank-Nicolson.
Both solve a tridiagonal system each step.
"""
u = u0.copy()
r = alpha * dt / dx**2
ab = build_tridiagonal(len(u), r, theta)
for _ in range(nt):
# Build RHS: u^n plus explicit part (for CN)
rhs = u[1:-1].copy()
if theta < 1.0: # Crank-Nicolson: add explicit part
rhs += (1-theta)*r * (u[:-2] - 2*u[1:-1] + u[2:])
# BCs enter as: first row gets +r*u[0]=0, last row gets +r*u[-1]=0
u[1:-1] = solve_banded((1, 1), ab, rhs)
return u
# ── Exact solution (Fourier series) for top-hat IC ───────────────────────────
def exact_diffusion(x, T, alpha, n_terms=40):
u = np.zeros_like(x)
for n in range(1, n_terms+1):
# Fourier coefficients for top-hat on [0.3, 0.7] ⊂ [0,1]
bn = (2.0 / (n*np.pi)) * (np.cos(n*np.pi*0.3) - np.cos(n*np.pi*0.7))
u += bn * np.exp(-alpha * (n*np.pi)**2 * T) * np.sin(n*np.pi*x)
return u
# ── Setup ────────────────────────────────────────────────────────────────────
N = 100
alpha = 0.01
T_end = 3.0
dx = 1.0 / (N - 1)
x = np.linspace(0, 1, N)
u0 = np.zeros(N)
u0[(x > 0.3) & (x < 0.7)] = 1.0
u0[0] = u0[-1] = 0.0
u_exact = exact_diffusion(x, T_end, alpha)
# ── Explicit: must use small dt (r = 0.4 < 0.5) ─────────────────────────────
dt_expl = 0.4 * dx**2 / alpha # CFL-like criterion for diffusion
nt_expl = int(T_end / dt_expl)
u_expl = diffuse_explicit(u0, alpha, dx, dt_expl, nt_expl)
# ── Implicit: use 50× larger dt ─────────────────────────────────────────────
dt_impl = 50 * dt_expl
nt_impl = int(T_end / dt_impl)
u_btcs = diffuse_implicit(u0, alpha, dx, dt_impl, nt_impl, theta=1.0)
u_cn = diffuse_implicit(u0, alpha, dx, dt_impl, nt_impl, theta=0.5)
print('=== Scheme comparison ===')
print(f'Explicit FTCS: dt = {dt_expl:.4e} s, nt = {nt_expl:6d} steps')
print(f'Implicit BTCS: dt = {dt_impl:.4e} s, nt = {nt_impl:6d} steps ({nt_expl//nt_impl}× fewer!)')
print(f'Crank-Nicolson: dt = {dt_impl:.4e} s, nt = {nt_impl:6d} steps')
print()
print('L2 errors vs exact:')
for name, u_num in [('Explicit FTCS', u_expl), ('Implicit BTCS', u_btcs), ('Crank-Nicolson', u_cn)]:
err = np.sqrt(np.mean((u_num - u_exact)**2))
print(f' {name:20s}: {err:.5f}')
print()
print('CN has the same number of time steps as BTCS but better accuracy')
print('because it is second-order in time (BTCS is first-order).')
# ── Plots ─────────────────────────────────────────────────────────────────────
fig, axes = plt.subplots(1, 3, figsize=(14, 5))
for ax, u_num, label in zip(axes,
[u_expl, u_btcs, u_cn],
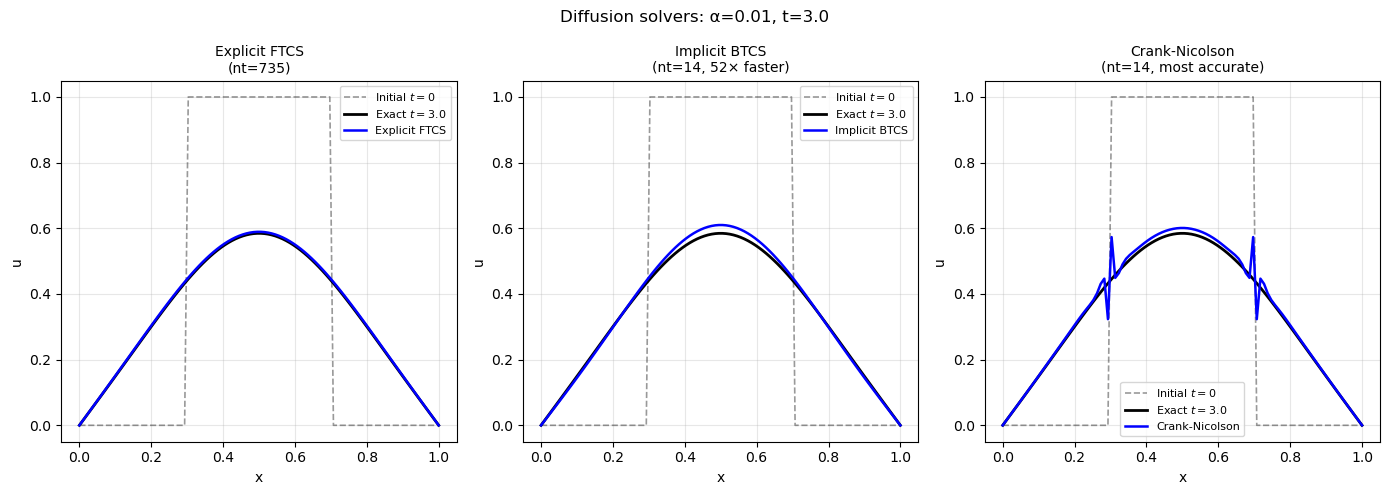
[f'Explicit FTCS\n(nt={nt_expl})',
f'Implicit BTCS\n(nt={nt_impl}, {nt_expl//nt_impl}× faster)',
f'Crank-Nicolson\n(nt={nt_impl}, most accurate)']):
ax.plot(x, u0, 'k--', lw=1.2, alpha=0.4, label='Initial $t=0$')
ax.plot(x, u_exact, 'k-', lw=2, label=f'Exact $t={T_end}$')
ax.plot(x, u_num, 'b-', lw=1.8, label=label.split('\n')[0])
ax.set_title(label, fontsize=10)
ax.set_xlabel('x'); ax.set_ylabel('u')
ax.legend(fontsize=8); ax.grid(True, alpha=0.3)
plt.suptitle(f'Diffusion solvers: α={alpha}, t={T_end}', fontsize=12)
plt.tight_layout()
plt.show()
=== Scheme comparison ===
Explicit FTCS: dt = 4.0812e-03 s, nt = 735 steps
Implicit BTCS: dt = 2.0406e-01 s, nt = 14 steps (52× fewer!)
Crank-Nicolson: dt = 2.0406e-01 s, nt = 14 steps
L2 errors vs exact:
Explicit FTCS : 0.00343
Implicit BTCS : 0.01276
Crank-Nicolson : 0.02598
CN has the same number of time steps as BTCS but better accuracy
because it is second-order in time (BTCS is first-order).
4. Von Neumann Stability Analysis — Proving
The method
Assume the error grows as a Fourier mode: where is the amplification factor. Substitute into the scheme and solve for .
Stability condition: for all wavenumbers .
For explicit FTCS
Substituting into :
For stability: , i.e. .
The upper bound gives (always true). The lower bound gives:
Worst case (, the shortest resolved wave): .
For implicit BTCS
Since the denominator always, for all — unconditionally stable.
Summary
| Scheme | Stability | Order (space×time) | Cost per step | When to use |
|---|---|---|---|---|
| Explicit FTCS | 2×1 | (no solve) | Quick tests, coarse grids, pedagogy | |
| Implicit BTCS | Unconditional | 2×1 | (tridiag) | Steady state, coarse time accuracy |
| Crank-Nicolson | Unconditional | 2×2 | (tridiag) | Time-accurate simulations (preferred) |
In the Navier-Stokes solver (Module 2): Viscous terms are discretised implicitly (BTCS or CN) to avoid the constraint — otherwise near-wall cells with tiny would force microsecond time steps on a flow that takes seconds to develop.
Next: Module 1.8 — 1D Burgers' Equation: combining advection and diffusion, introducing nonlinearity, and witnessing shock formation.